
.png)
Liste de matériel complète
Consommables du kit
Le patron du kit
Du carton de récupération (type boîte à chaussure)
Un kit motoréducteur
Un interrupteur 3 positions
2 roues en plastique moyennes
2 mètres de fil électrique
4 trombones
1 boitier de piles
1 élastique
Outils
Crayon
Règle
Ciseaux
Pistolet à colle
Du ruban adhésif

▶️Vidéo Tutoriel
📐Patron du kit
Suis les étapes ci dessous avec Matthieu qui te guidera avec simplicité !
Étape 1
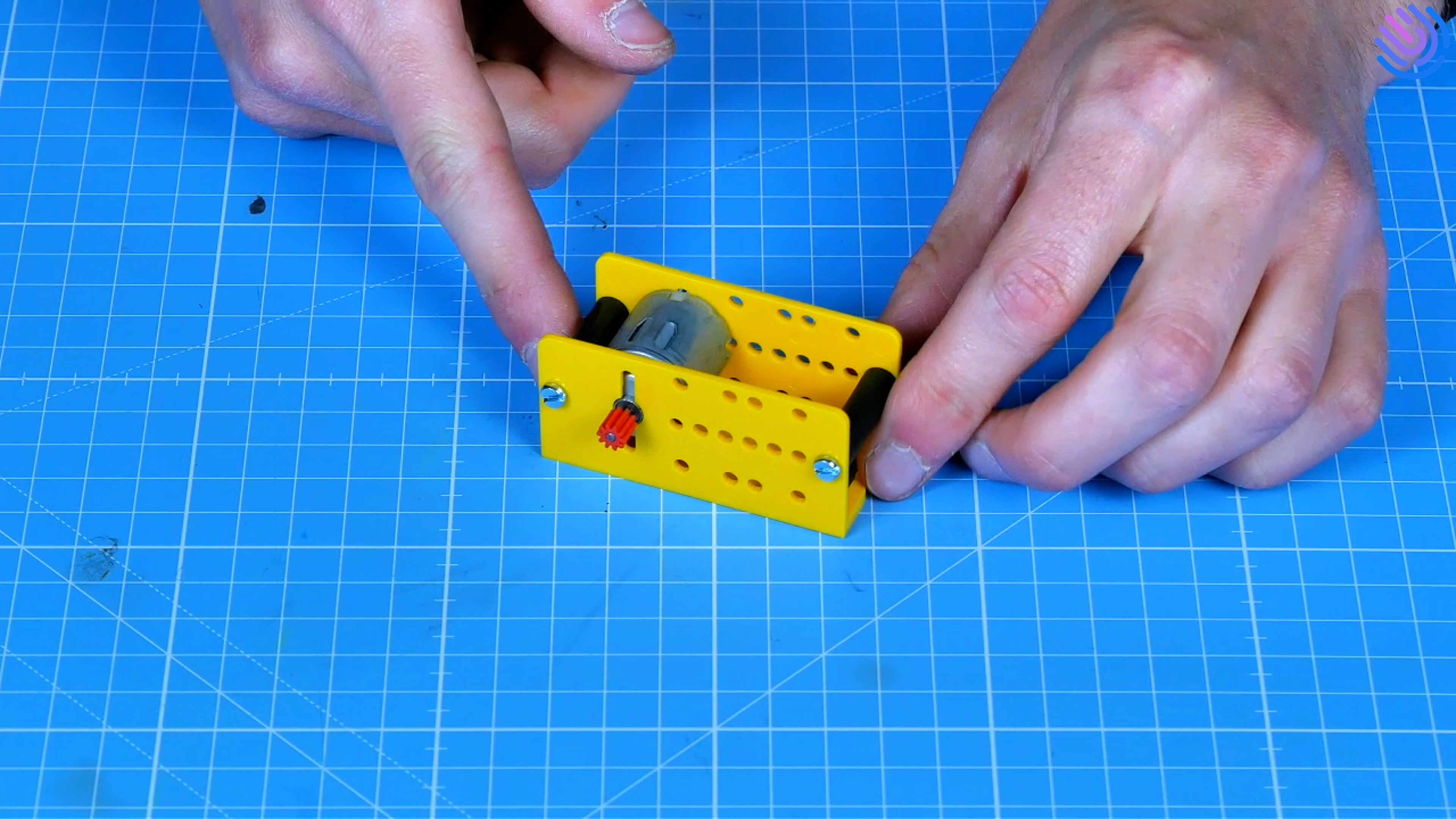
Motoréducteur
Commence par déballer ton kit motoréducteur, assemble le châssis jaune avec le moteur à l’intérieur, puis insère le pignon (petit engrenage rouge) sur l’axe du moteur.
❗ Erreur à ne pas faire
N’oublie pas les entretoises (cylindres noirs) et serre bien les écrous sur les vis. Appuie avec le moteur sur la table pour entrer le pignon.
Étape 2
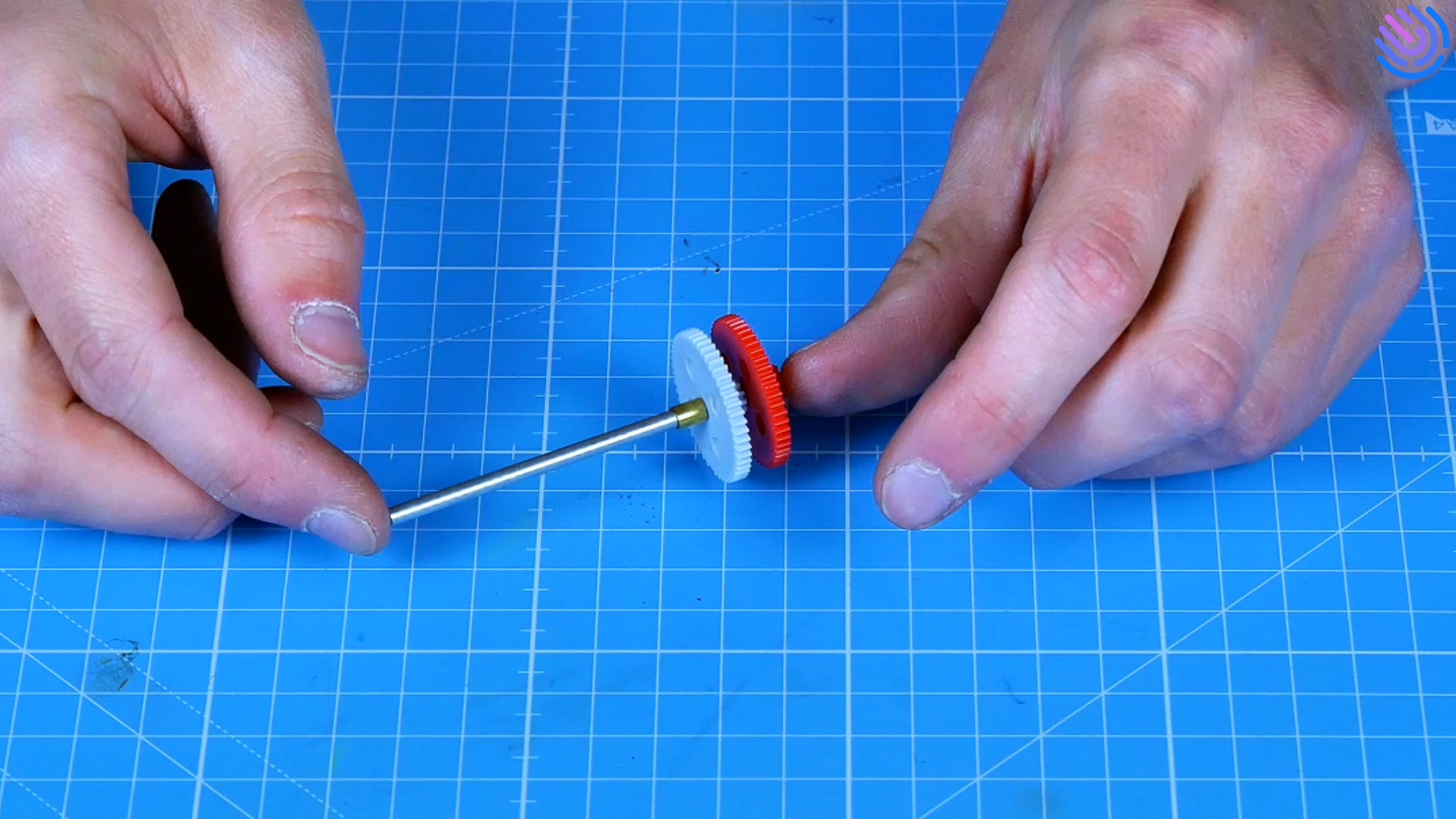
Insère un grand engrenage rouge sur l’axe moyen, avec sa tête juste au bord. Insère ensuite derrière un grand engrenage gris dans le même sens, et une petite douille en laiton.
⚠️ Sécurité avant tout
Il va falloir forcer un peu pour entrer les engrenages rouges, c’est possible de s’aider en appuyant l’axe contre la table mais attention à ne pas te blesser !
Étape 3
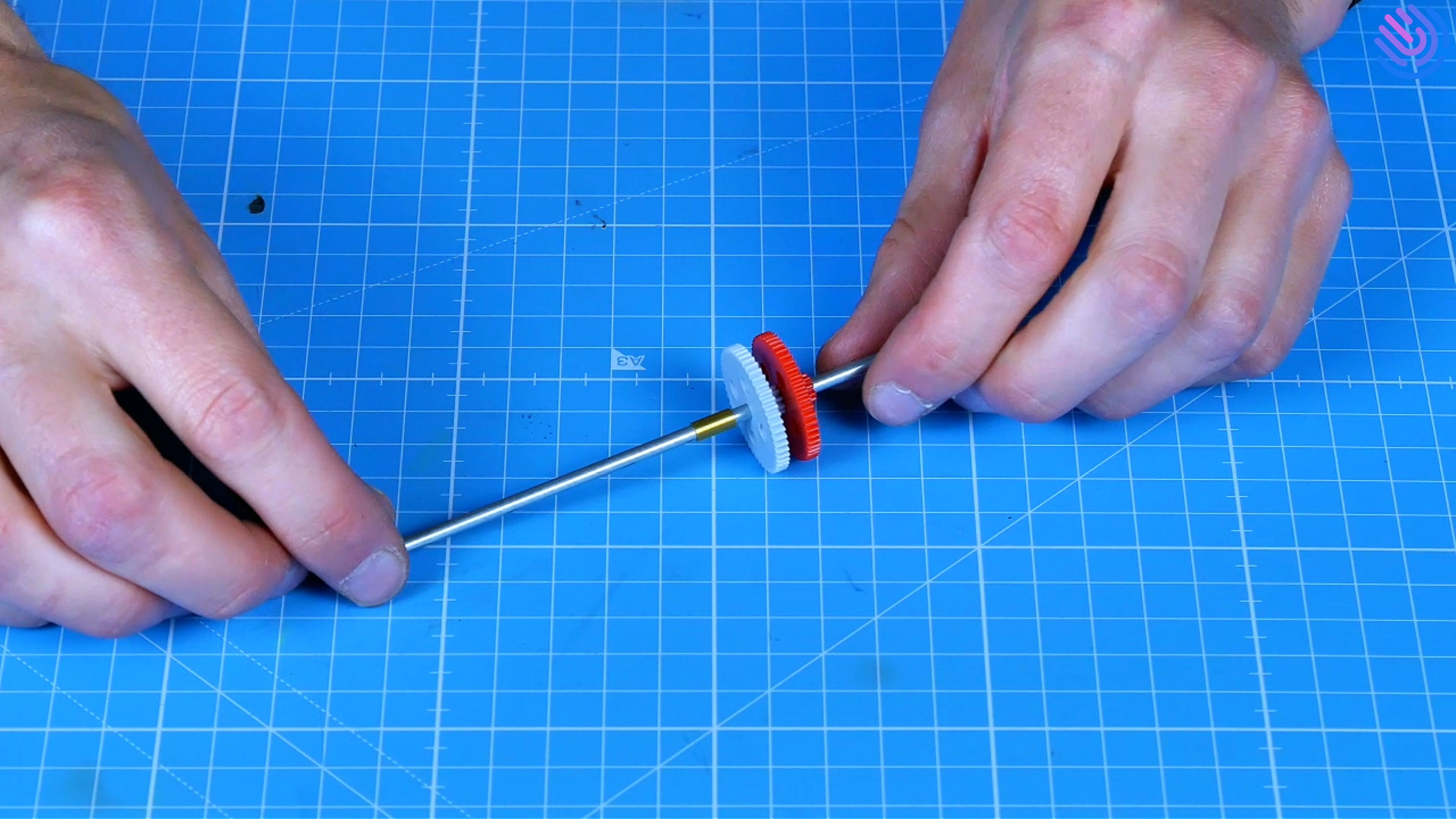
Insère un grand engrenage rouge sur le plus grand axe, avec sa tête à 2 cm du bord. Insère ensuite derrière un grand engrenage gris dans le même sens, et une grande douille en laiton.
Étape 4
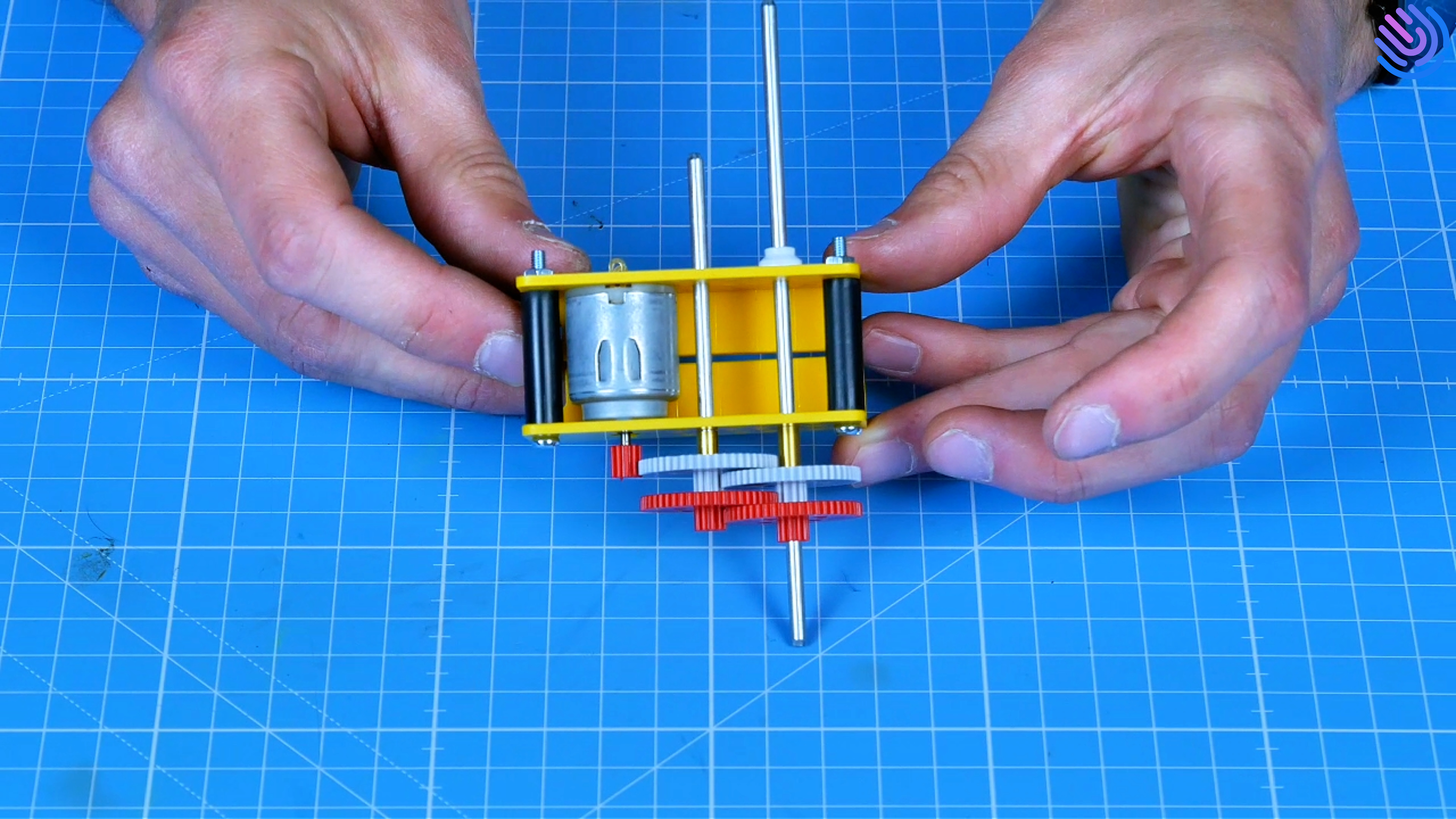
Imbrique les barres entre elles et glisse les dans le châssis comme indiqué, puis serre la grande avec la rondelle blanche contre le châssis.
Étape 5
L’interrupteur
Commence par couper 4 fils électriques identiques de 50cm. Puis coupe un morceau de 4cm dans 2 des grands fils que tu viens de couper.
Étape 6
Dénude les extrémités des 6 fils : pince la gaine en plastique à environ 1 cm de l’extrémité du fil avec tes ciseaux, sans le couper, puis retire-la délicatement.
💡 L’astuce de Matthieu
Tu peux t’entraîner sur un morceau de fil électrique inutile avant ! Pense à torsader les brins du fil entre eux.
Étape 7
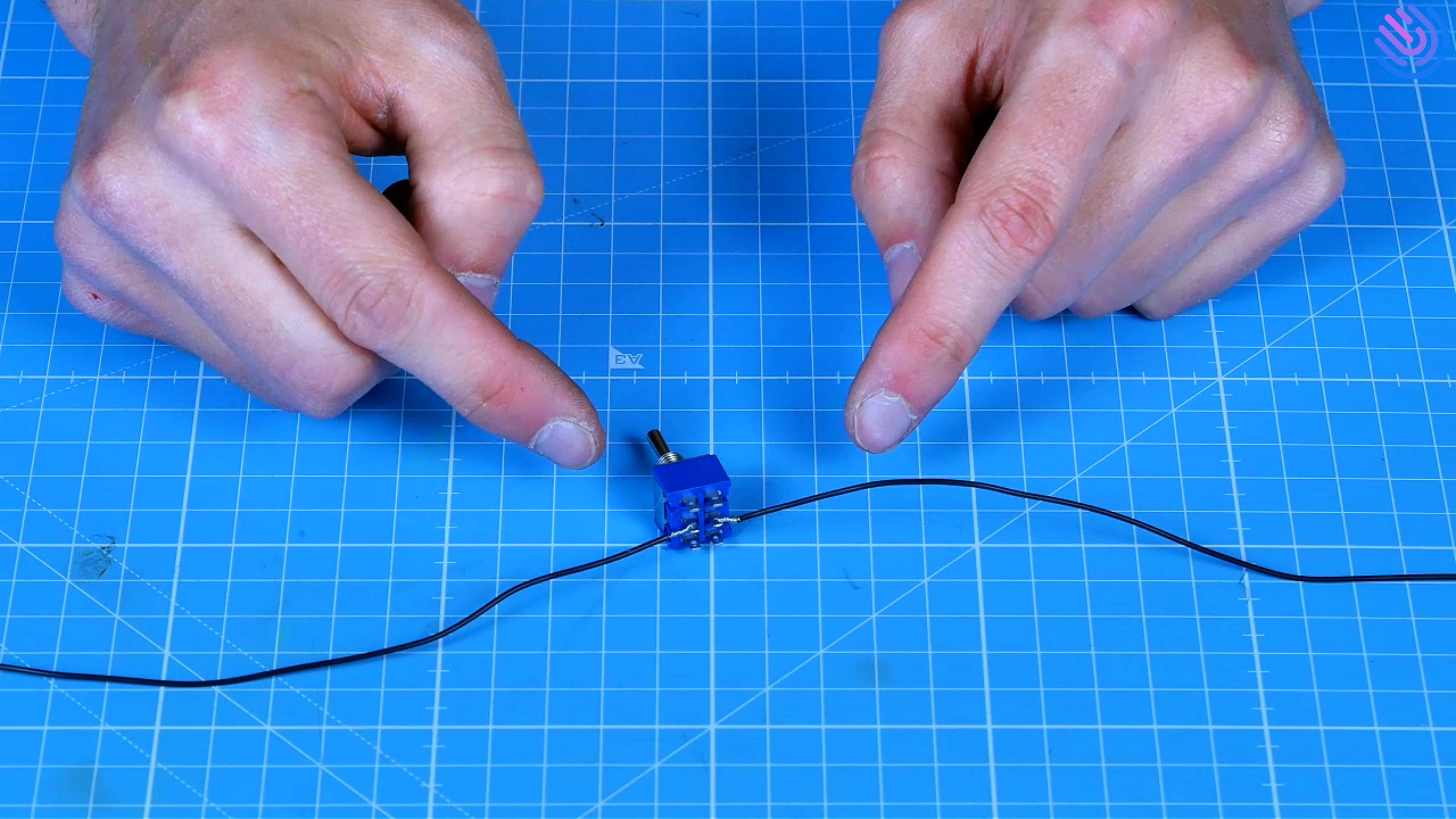
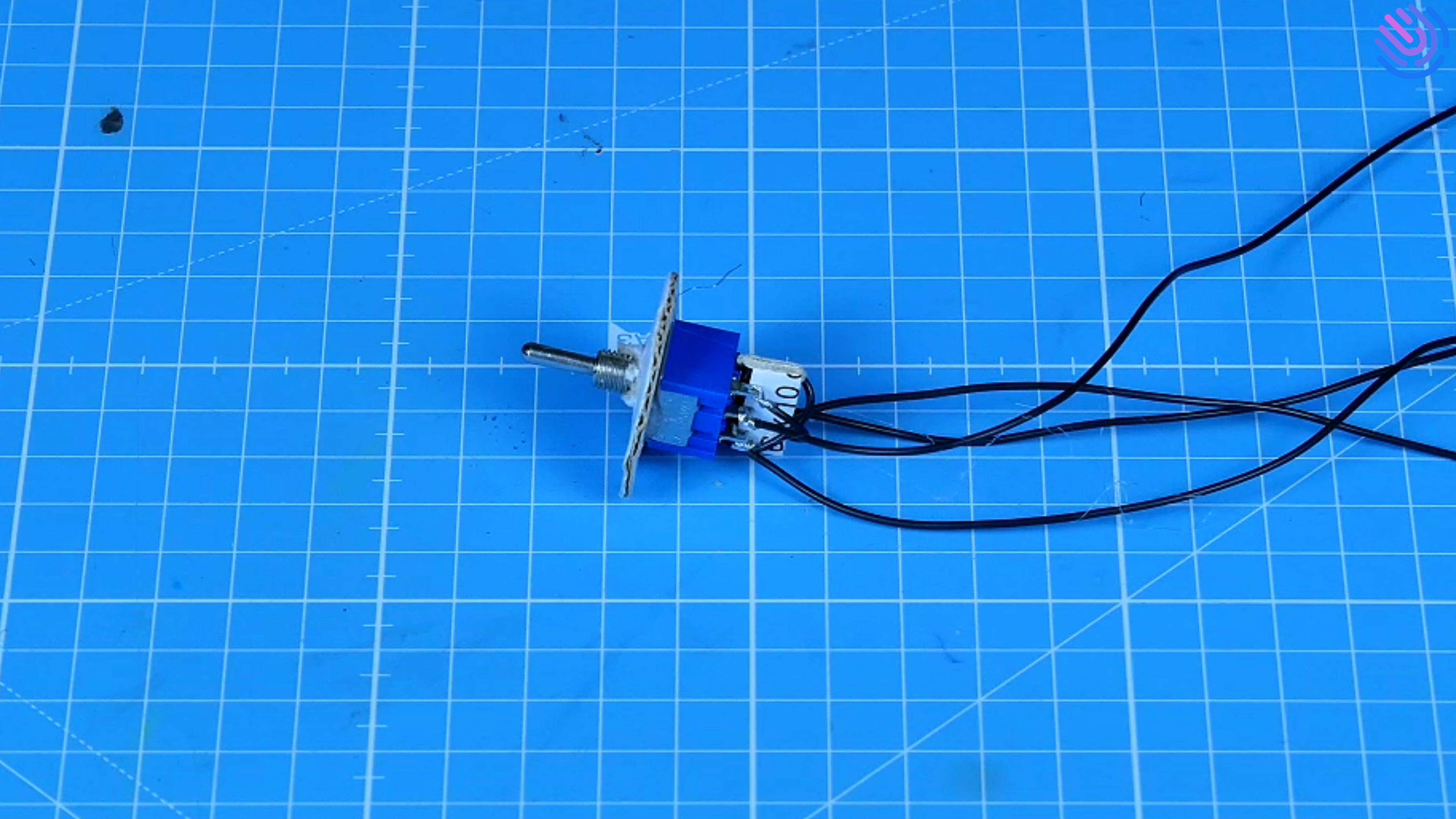
Attache les plus grands fils à chacune des broches du milieu de l’interrupteur. Pour ça, insère-les dedans, puis torsade proprement autour.
❗ Erreur à ne pas faire
Aucun brin ne doit toucher une autre broche de l’interrupteur donc soit précis pour éviter les courts circuits.
Étape 8
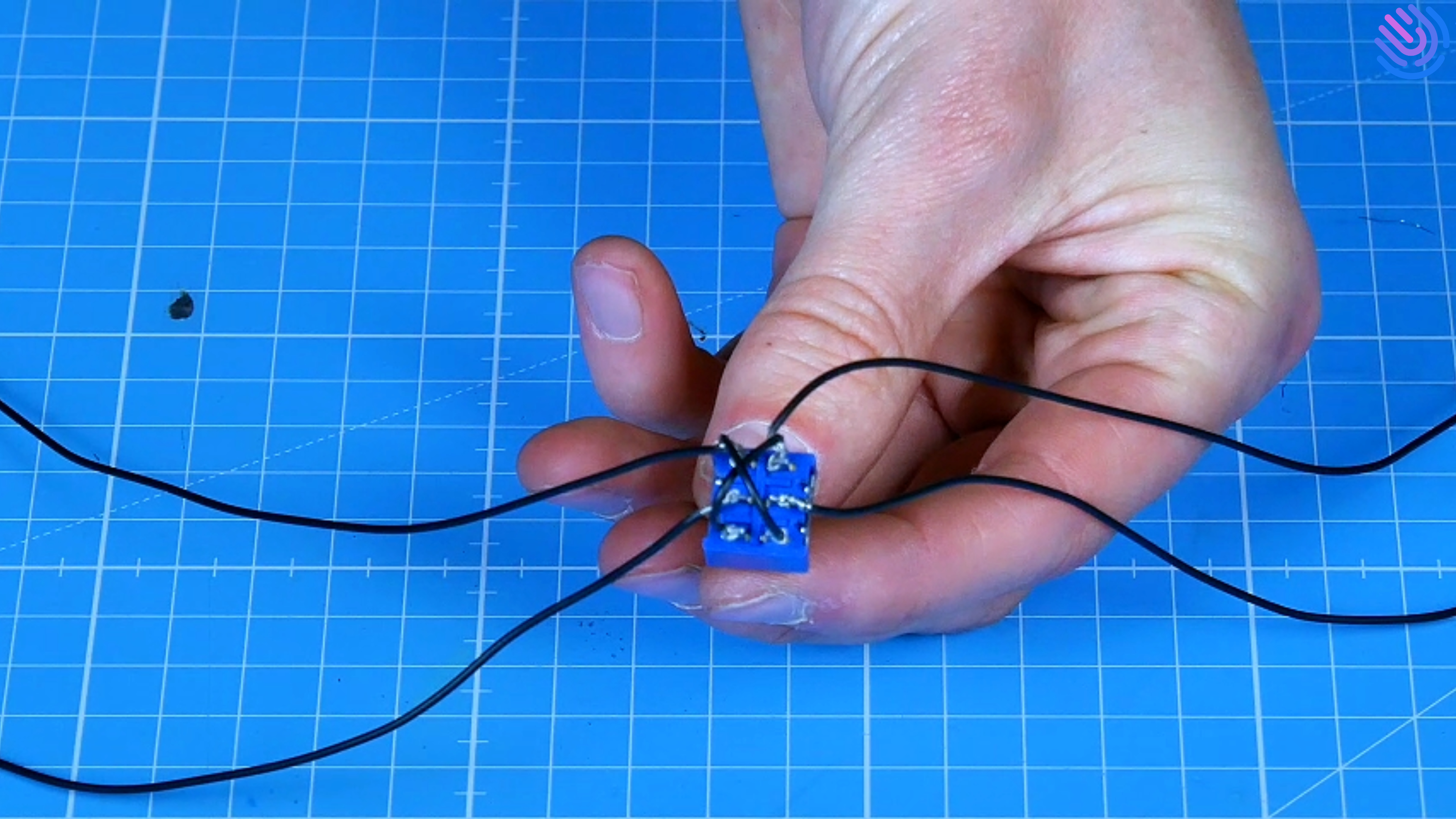
Relie entre eux les petits fils à leur grand fil d’origine en les torsadant entre eux. Puis attache les comme indiqué à l’interrupteur en formant une croix avec les petits fils.
💡 L’astuce de Matthieu
Pour éviter les courts circuits, tu peux insérer un morceaux de carton plié sur lui même entre les broches.
Étape 9
La télécommande
Reporte, découpe et perce les pièces n°1 dans du carton, puis colle l’interrupteur dans l’une d’entre elles.
💡 L’astuce de Matthieu
Tu peux utiliser un pique à brochette ou un cure dent pour les percer proprement.
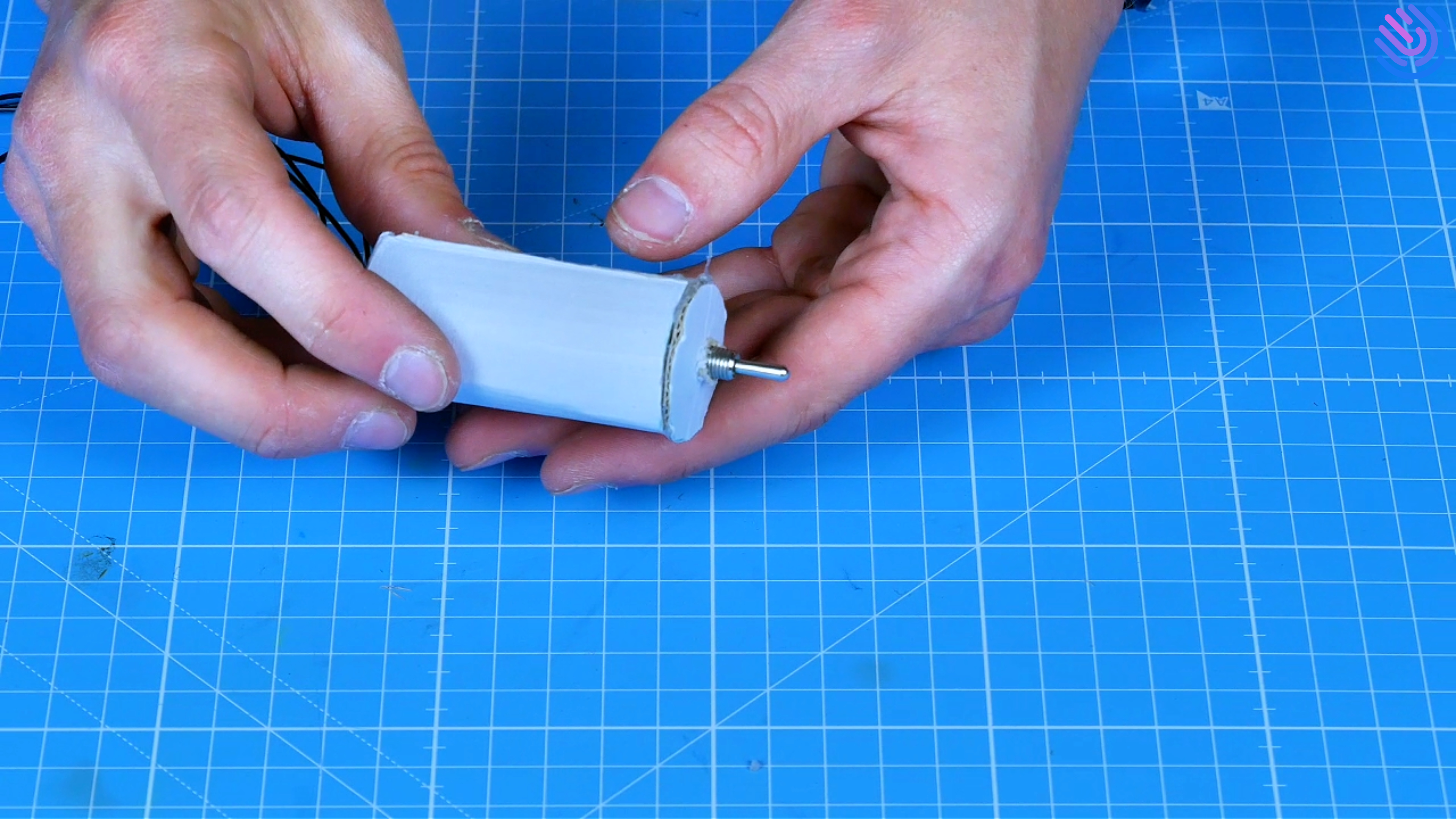
Étape 10
Reporte et découpe la pièce n°2 dans du carton, enroule et colle là sur elle même puis colle là sur la pièce n°1 en passant les fils dedans.
💡 L’astuce de Matthieu
Si les rainures du carton sont perpendiculaires dans sa longueur, ça sera plus facile pour l’arrondir, en t’aidant avec le bord d’une table ou ta règle.

Étape 11
Torsade les grands fils entre eux, glisse les dans la pièce restante, et colle là à la base de la télécommande.

Étape 12
Attache des trombones à l’extrémité des 2 plus grands fils les plus courts (connectés à la croix), et sécurise la connexion avec du ruban adhésif si tu le souhaite.
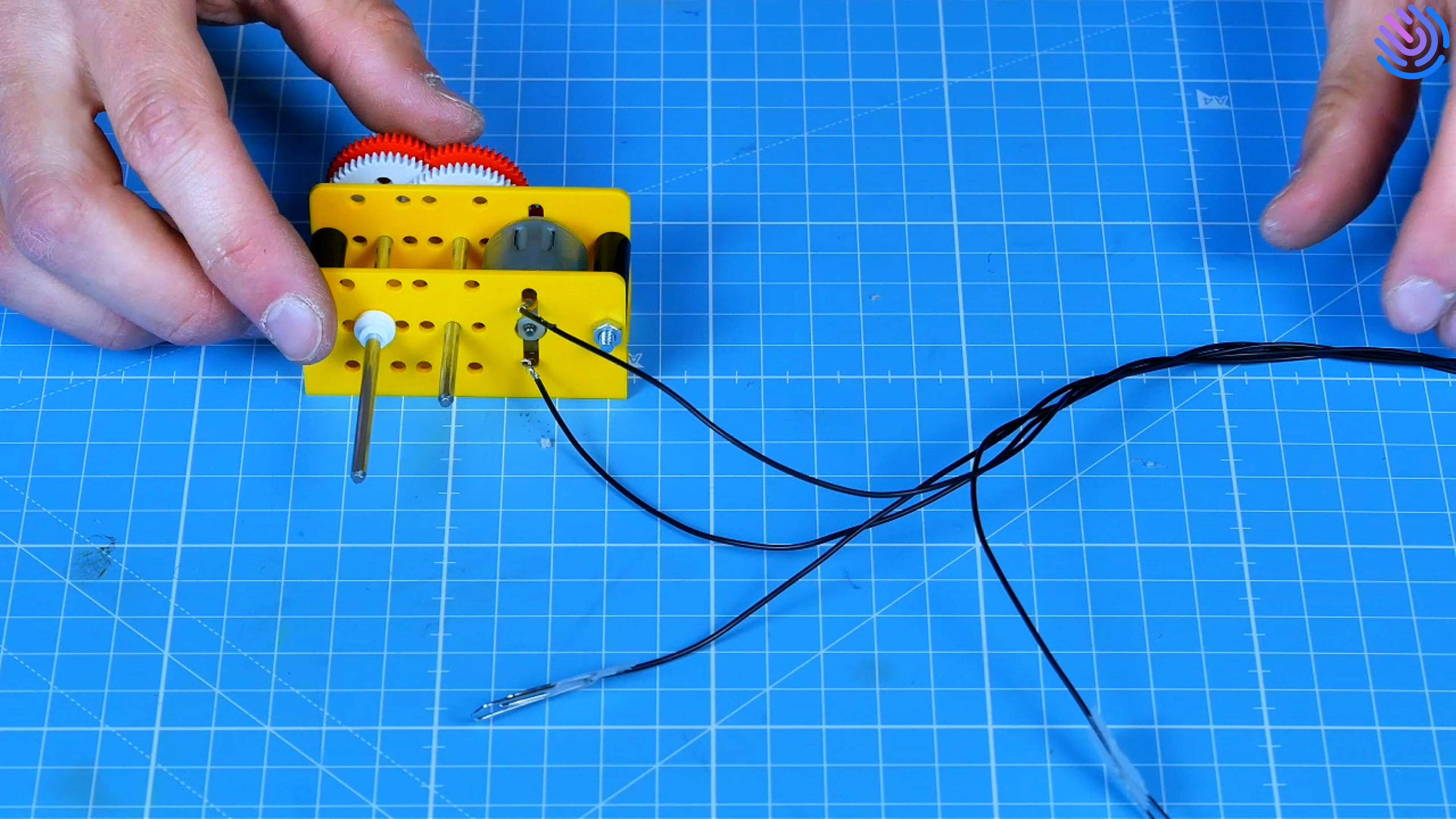
Étape 13
La propulsion
Attache l’extrémité des fils sans trombone aux broches du moteur. Pour ça insère les dedans, puis torsade proprement autour.
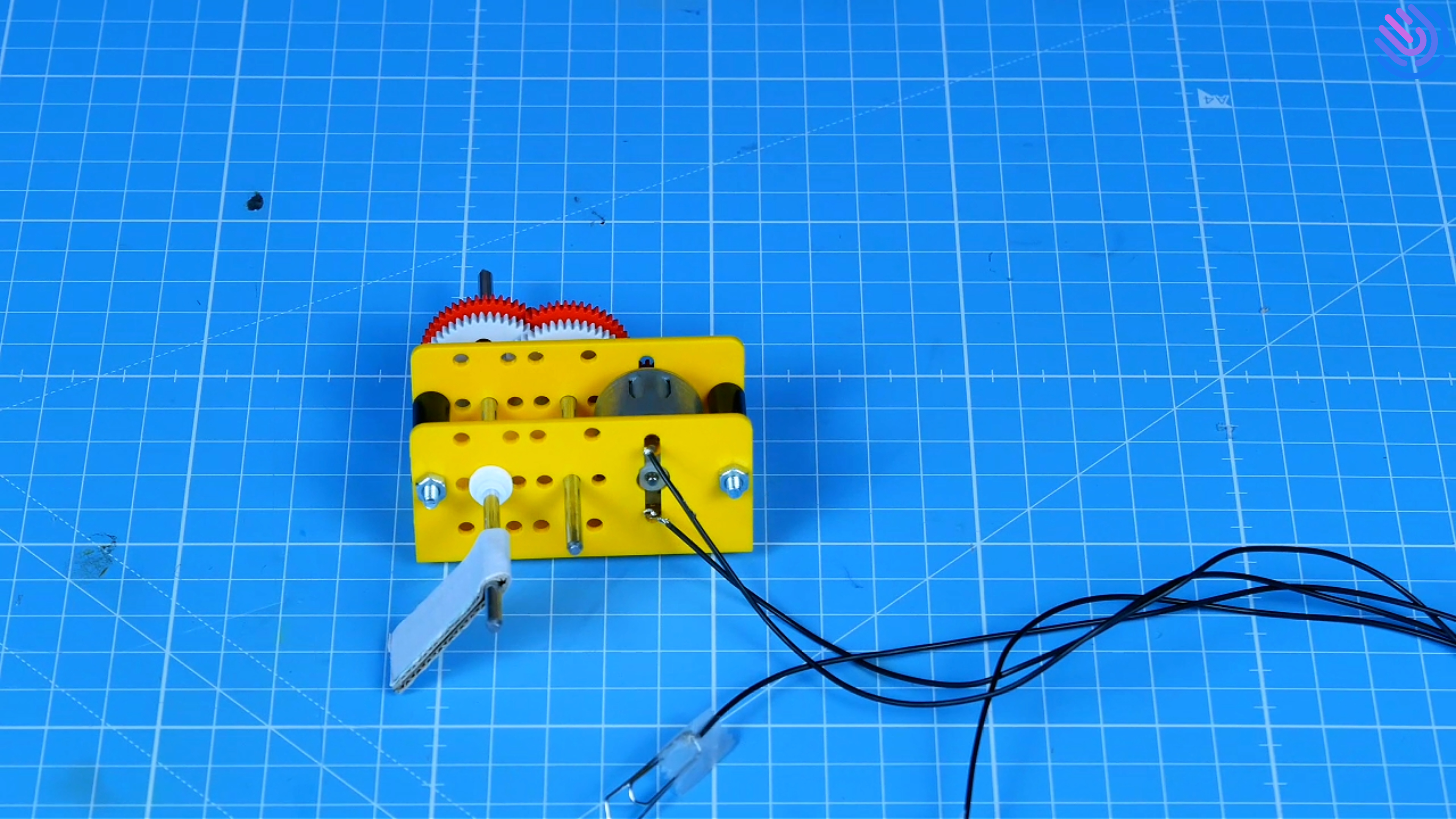
Étape 14
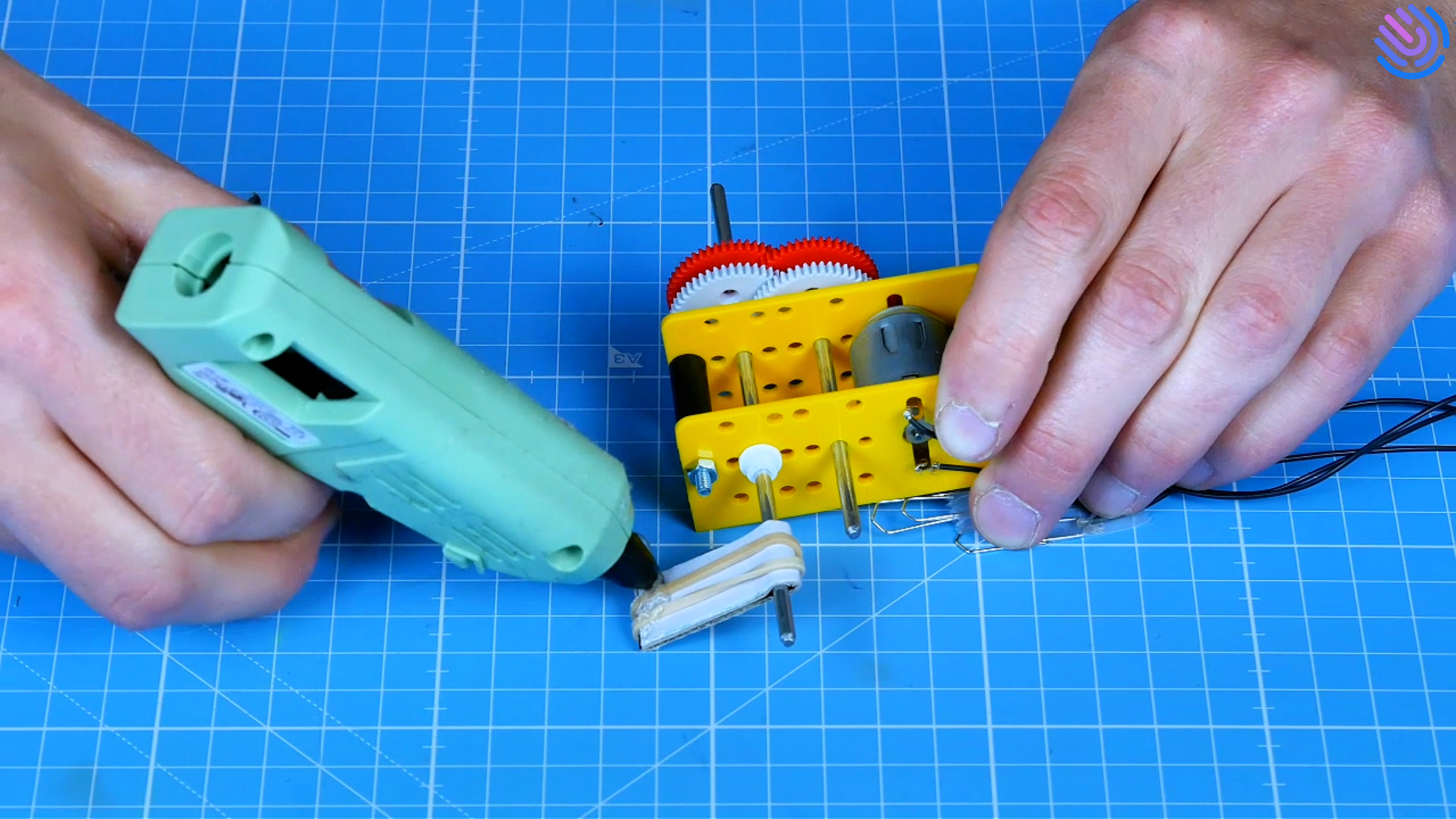
Reporte et découpe la pièce n°3 dans du carton, plie là en deux, puis colle là sur elle même comme indiqué autour du grand axe du côté sans engrenage.
❗ Erreur à ne pas faire
Ne mets pas de colle sur l’axe en métal, il faut que la pièce tienne dessus mais puisse tourner autour.
Étape 15
Fais un huit avec l’élastique, et enfile le autour de cette pièce. Ajoute un peu de colle dessus pour qu’il ne bouge pas.
Étape 16
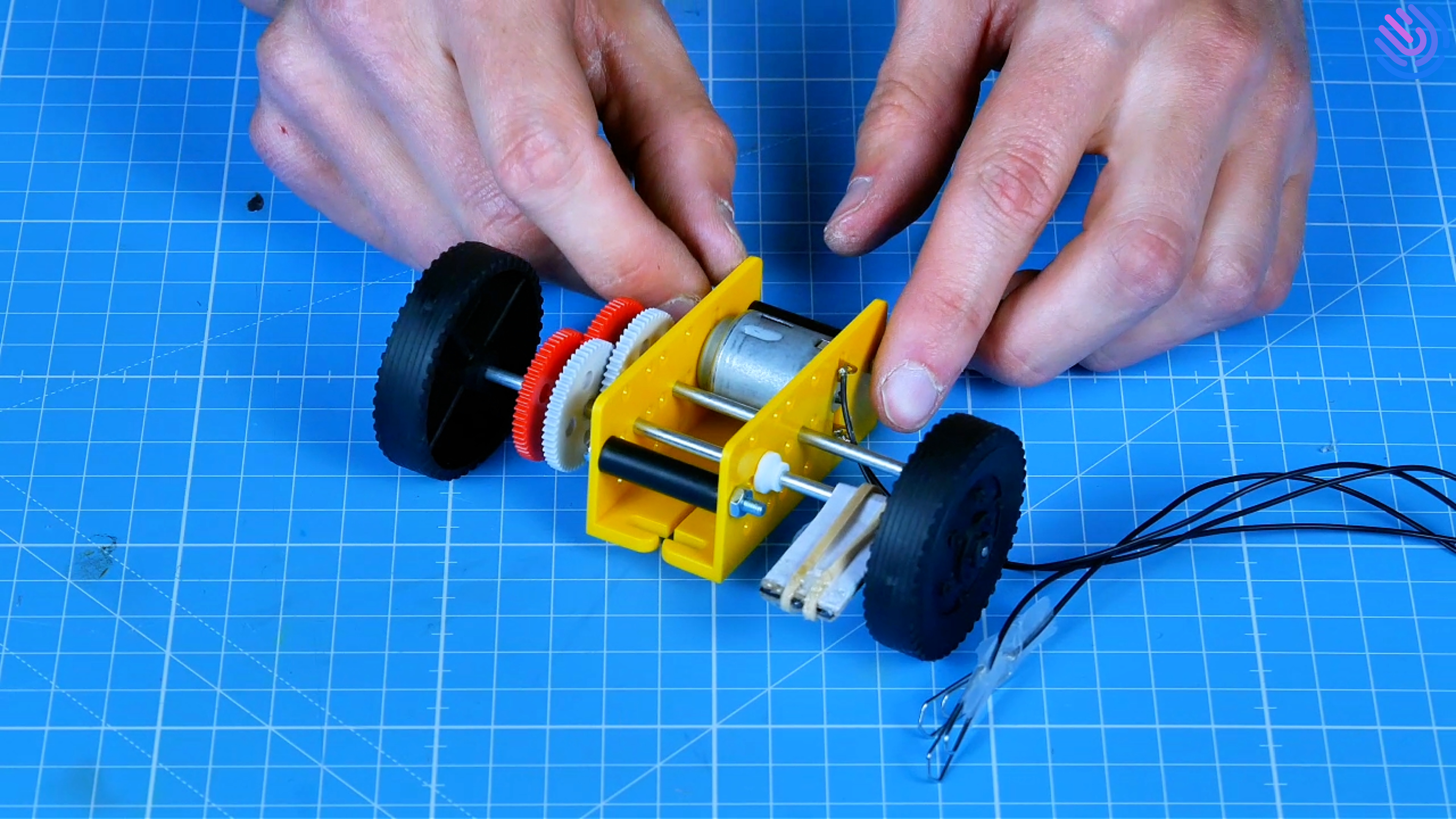
Insère les roues de part et d’autre du grand axe.
💡 L’astuce de Matthieu
Pour les rentrer plus facilement tu peux les faire tourner de gauche à droite en poussant.
Étape 17
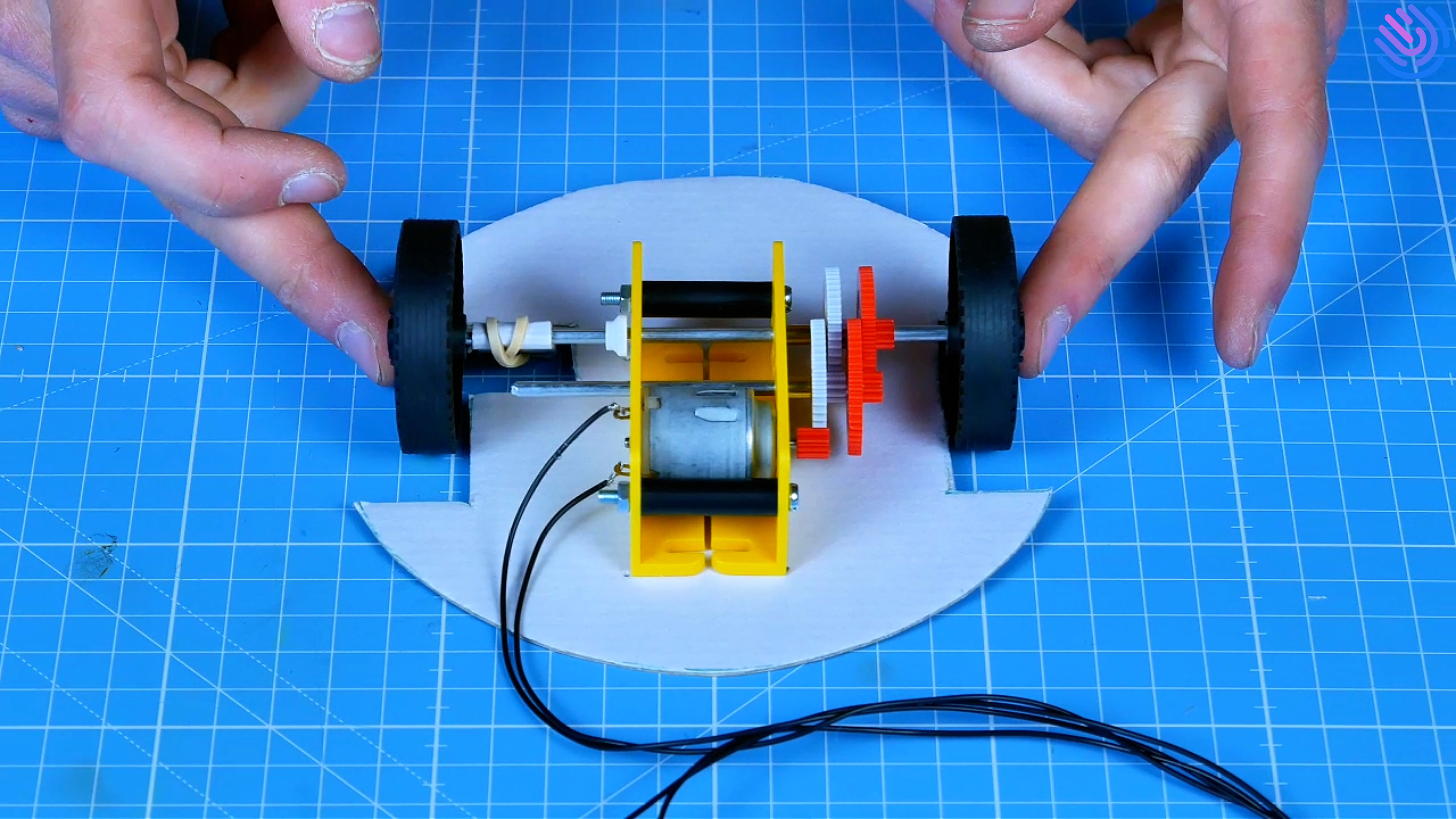
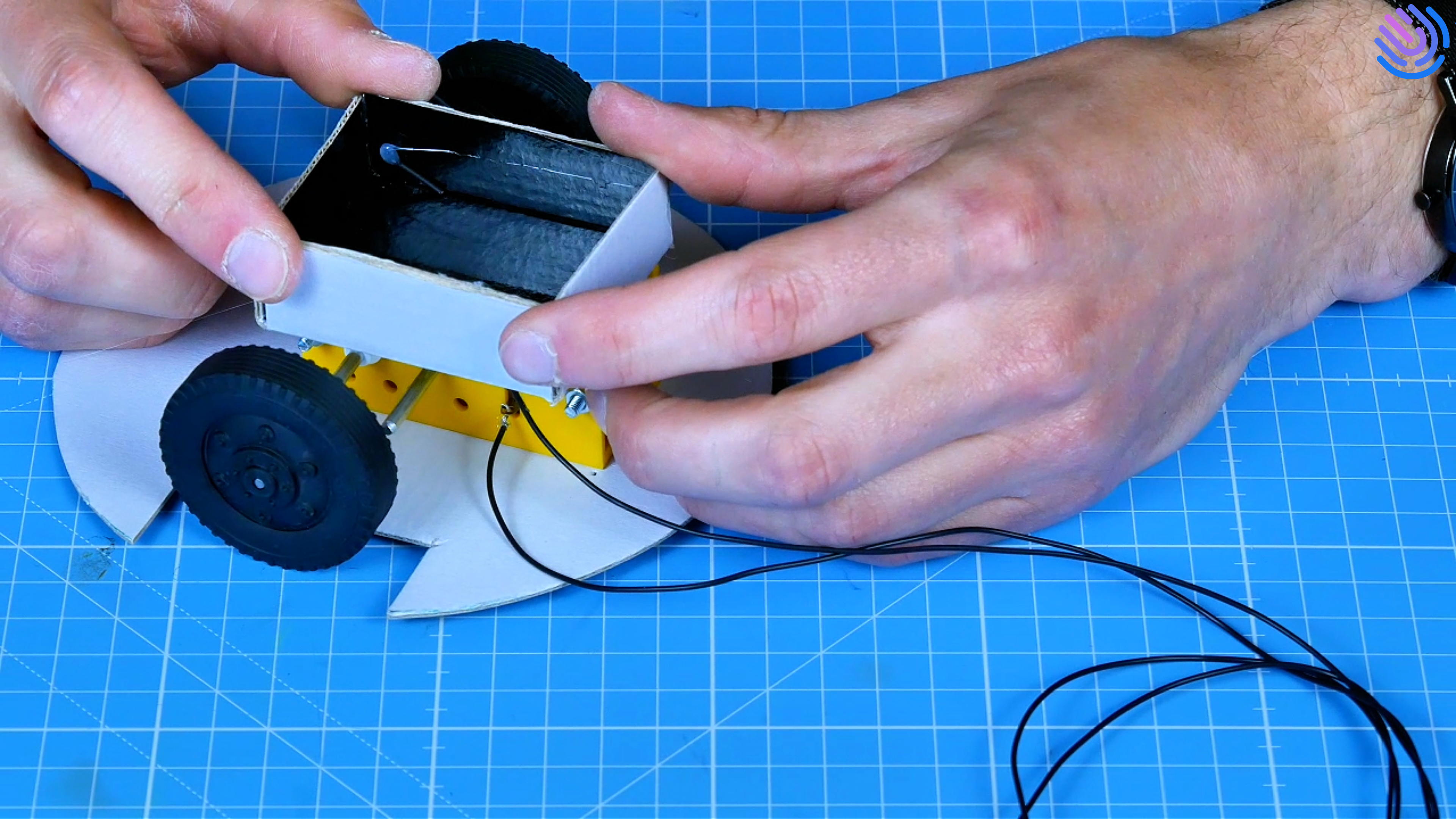
Reporte et découpe la base circulaire n°4, puis colle le châssis du motoréducteur comme indiqué sur le patron, pour que les roues passent dans les encoches.
Étape 18
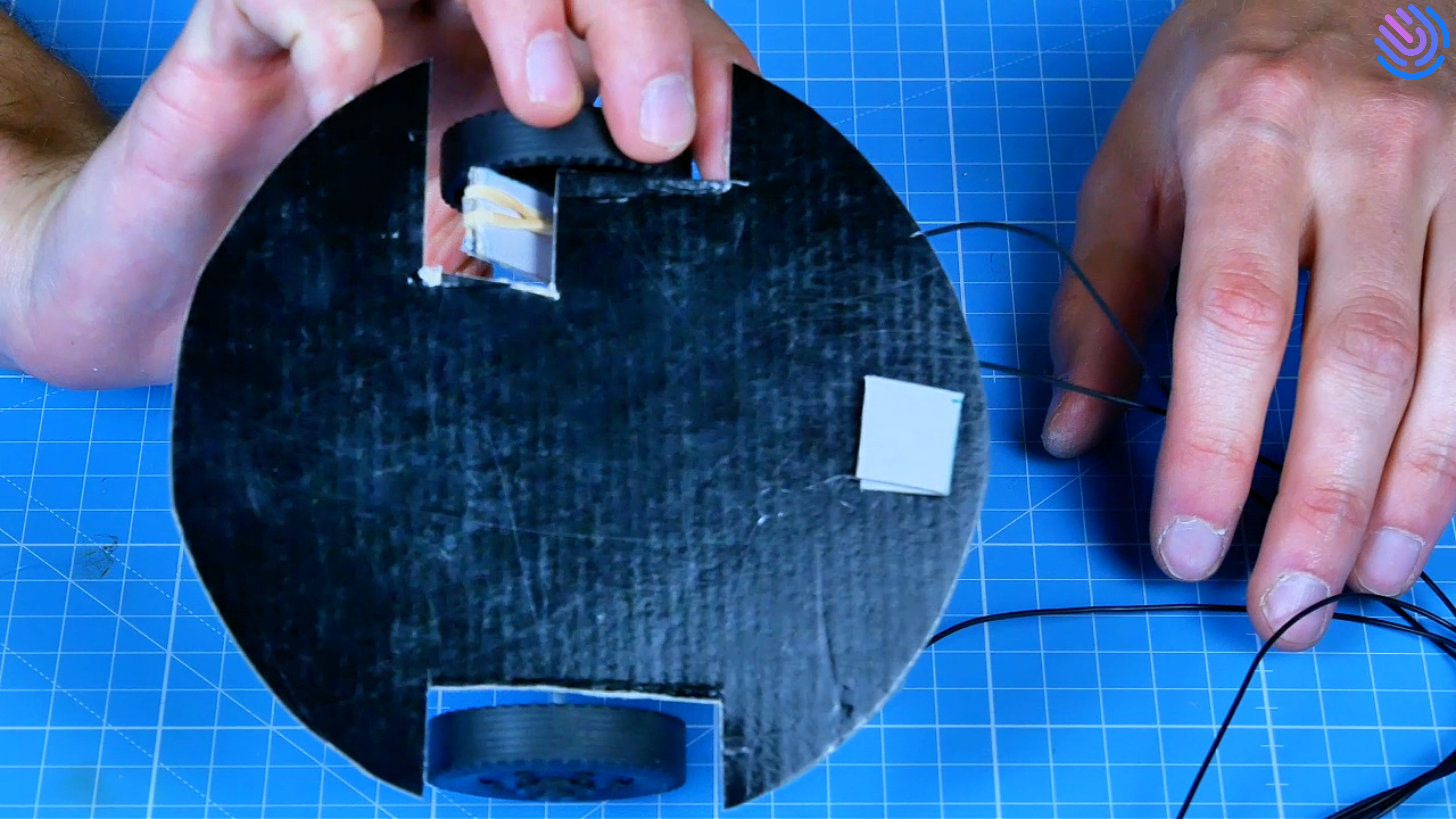
Découpe deux petits carrés de 1cm de côté et colle les l’un sur l’autre sous la base du côté du motoréducteur.

Étape 19
Piles et customisation
Reporte et découpe le support de piles n°5 dans du carton. Marque les plis en écrasant sur les traits avec une règle, puis plie et colle les rabats entre eux.
Étape 20
Colle le support de piles sur le châssis du motoréducteur sans que ça ne touche les engrenages.
Étape 21
Si besoin, dénude les fils du boîtier de piles, et colle-les l’un à l’opposé de l’autre pour éviter tout court-circuit.
⚠️ Sécurité avant tout
Pense à toujours retirer les piles du boîtier pendant tes manipulations.
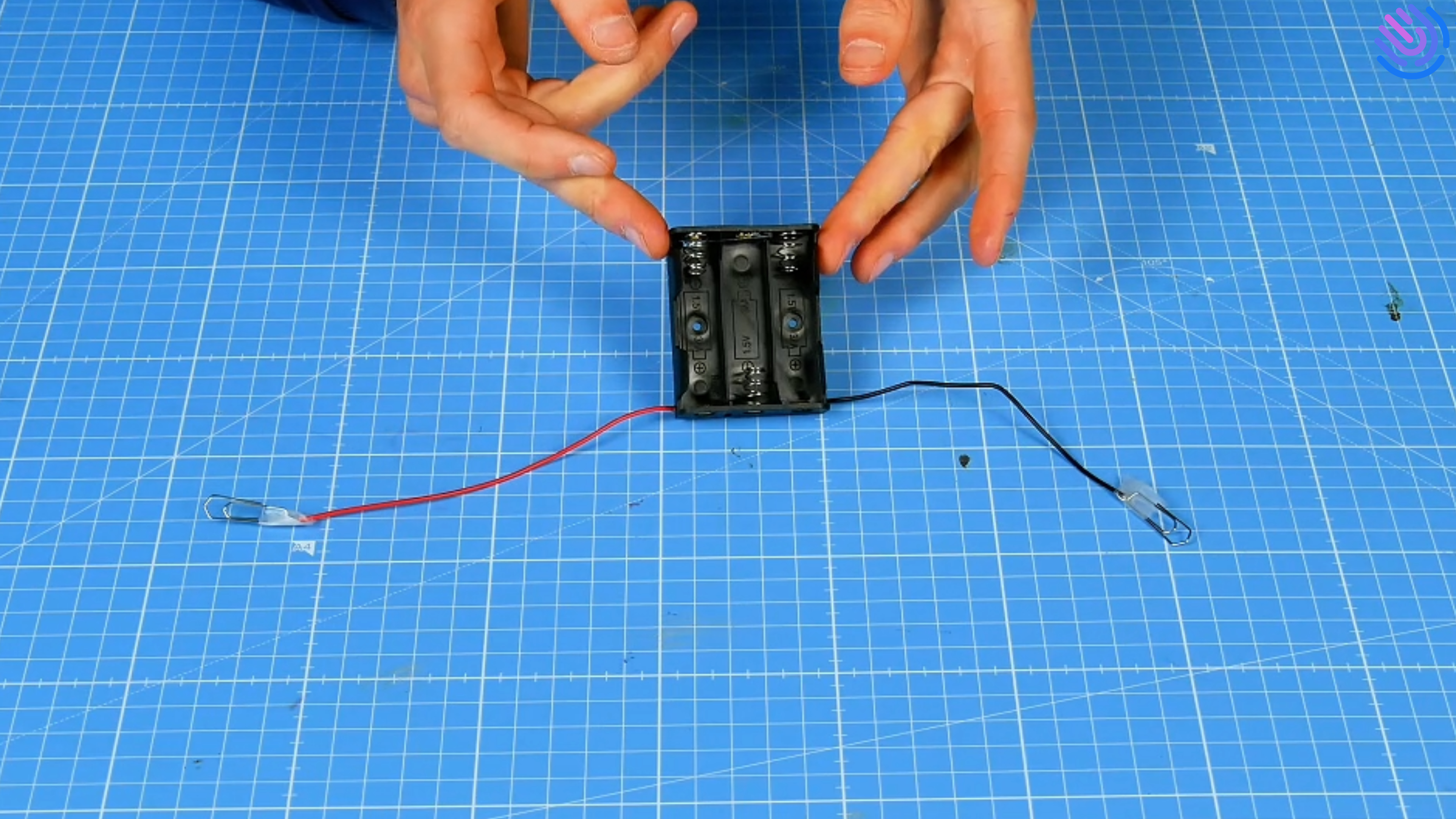
Étape 22
Enroule chacun des fils du boîtier autour d'un trombone, sans oublier de les sécuriser avec du scotch.
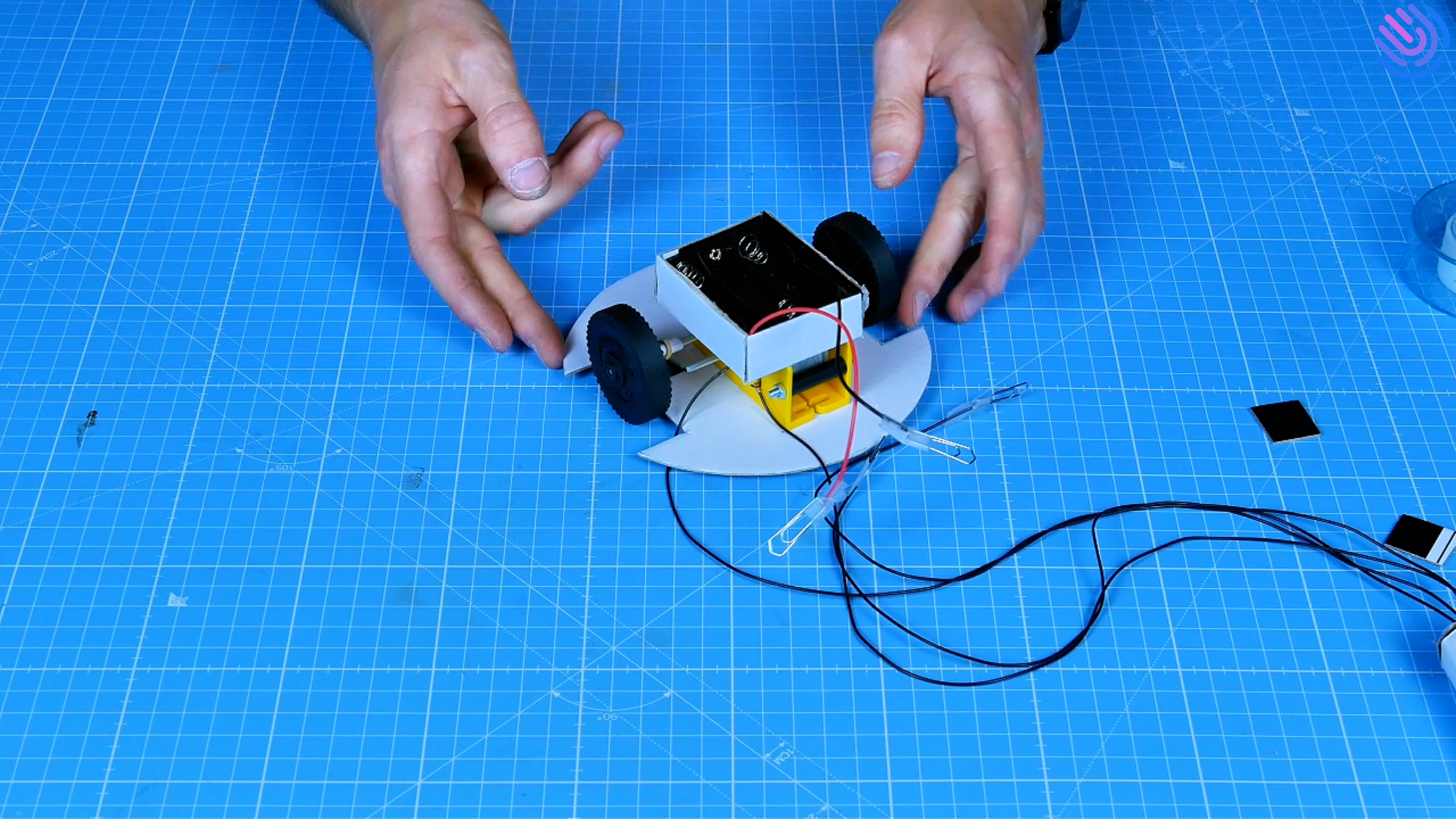
Étape 23
Mets le boîtier de piles dans le support en carton et coince les trombones dans ceux provenant de la télécommande, puis scotche les fils sur la base.
⚠️ Sécurité avant tout
Attention à ce que les trombones ne se touchent pas entre eux pour éviter les courts circuits.
Étape 24
Maintenant, à toi de jouer pour que ton robot ressemble à un rover martien ou à WALL-E, par exemple (bras robotique, antenne, panneau solaire en carton…).
🔬 Tests et expérimentations
🔋 Avant de mettre les piles, fais une dernière vérification :
Les trombones ne se touchent pas.
Aucun brin de fil ne touche une autre broche de l’interrupteur.
Rien ne frotte dans les engrenages (pas de scotch, pas de colle, pas de carton dans le châssis).
⚠️ Pour ta sécurité : Ne mets les piles qu’à la fin, et retire-les dès que tu ne testes plus (ça évite les courts-circuits et ça économise les piles).
🤖 Test “au sol”
Actionne l’interrupteur : les roues doivent tourner dans un sens, puis dans l’autre.
Fais un test sur 30 cm : avance “tout droit” dans un sens, puis change de sens.
Observe ce que fait la pièce n°3 (la béquille) : dans un sens elle doit rester bloquée, dans l’autre elle doit toucher le sol et faire tourner le robot.
🔨 Mini dépannage (si ça ne marche pas)
Rien ne tourne : piles dans le bon sens ? trombones bien connectés ? fils bien serrés ?
Ça chauffe / ça sent le plastique : retire les piles tout de suite → il y a sûrement un court-circuit.
Ça tourne mais très lentement : piles usées, ou engrenages qui frottent.
⚛️ La science derrière le fun
⚙️ Le motoréducteur et la stabilité du robot
Le cœur de ton robot est le motoréducteur, un petit moteur associé à un système d'engrenages. Ces roues dentées transmettent un mouvement rotatif : les roues rouges sont fixées sur l'axe et tournent avec lui, tandis que les roues grises sont libres sur l'axe. En enchaînant plusieurs roues, on change la vitesse et la direction grâce au rapport de réduction. Celui du projet est de 625:1, cela signifie que pour 625 tours du moteur, les roues ne feront qu'un seul tour. C'est un peu comme lorsque tu fais du vélo en "petite vitesse" pour monter une côte : tu dois pédaler très vite, tes roues avancent doucement mais avec beaucoup de force afin de monter.
Pour que ce système fonctionne bien, il faut aussi une bonne adhérence des roues au sol et une grande stabilité. C'est pour cela que le centre de gravité du véhicule est maintenu bas : les piles sont placées dans le robot, tout en bas, pour alourdir la base.
🌀 La commande et le système de rotation
Pour diriger le robot, on utilise un circuit électrique d'inversement de polarité. La "croix" de petits fils sur l'interrupteur permet d'inverser le sens de circulation du courant et donc d'inverser le sens de rotation du moteur. C'est un peu comme lorsque tu inverses les piles d'une petite voiture : elle recule au lieu d'avancer. Ce changement de sens active le système de béquille pour la rotation. Dans un sens de rotation du moteur, le robot avance tout droit car la béquille est bloquée par le châssis et glisse sans toucher le sol. Dans l'autre sens de rotation, la pièce n°3 (la béquille) se cale contre le sol et soulève une des roues. Cela provoque un virage serré du robot sur lui-même.
💡 Pour les plus grands
En physique, la puissance d'un moteur est le produit de sa force par sa vitesse : P = F × V. Dans un système comme celui-ci, la puissance reste constante : si la vitesse diminue, la force augmente automatiquement.
Si on avait monté la roue directement sur le moteur sans réduction, elle aurait tourné très vite, mais le moteur n'aurait pas eu assez de force pour vaincre le poids du robot et les frottements du sol.
🎁Mission Bonus
Décore ta télécommande dans le style que tu souhaites !

Étape 25
Décore ta télécommande dans le style que tu souhaites !
Durée de l'activité | 2h30 |
Notions abordées | Engrenages, motoréducteur, adhérence, stabilité, alimentation, circuit électrique |
Compétences | Motricité fine, résolution de problèmes, démarche scientifique |
Thème principal | Mécanique, robotique, ingénierie |
Âge recommandé | 9 ans, 10 ans, 11 ans, 12 ans, 13 ans, 14 ans, 15 ans |
Classes | CM1, CM2, 6ème, 5ème, 4ème, 3ème |
Idéal pour | Activité à la maison, bricolage, DIY, atelier en classe, centre de loisirs, fête de la Science, école, collège, projet de groupe |
Points forts | Tutoriel facile, complet, guidé, ludique, concret, créatif |
Professionnels de l'éducation
Fiche pédagogique animation de groupe
Supervisez l’utilisation des pistolets à colle, les éloigner quand l’opération est terminée.
Les ciseaux doivent TOUJOURS être tenus par leurs poignées, jamais par leurs lames.
Être très vigilant lors de l’assemblage du motoréducteur, insérer les engrenages est difficile.
Toujours débrancher les piles avant d’avoir terminé et vérifié le circuit.
